Project description

ANTs-CP stands for Autonomous Negotiating Teams Challenge Problem
![]()
Project description
ANTs-CP consists of stationary nodes and moving targets. The aim is to track those moving targets with the help of nodes. A node essentially consists of a doppler sensor and an RF transceiver. The doppler sensor consists of three sensor 'heads' each capable of covering a particular sector of 120 degrees. Selection of a particular head at a particular time is under user control. The RF transceiver is used by a node to communicate with other nodes so that a proper configuration of all those sensor heads or sectors can be established so as to track the moving objects thoroughly and efficiently. A software module called 'Tracker' uses the measurements taken by nodes to compute the position of a target, which is then displayed.
The approach used to solve this problem is that of DCSP (Distributed Constraints Satisfaction Problem) algorithm with negotiation by argumentation. DCSP is used to arrive at a particular sector configuration for tracking a certain object and negotiation is used to negotiate allocating sector resources in case of conflicting demands.
The
current scenario consists of 10 nodes and two targets configured as
shown :
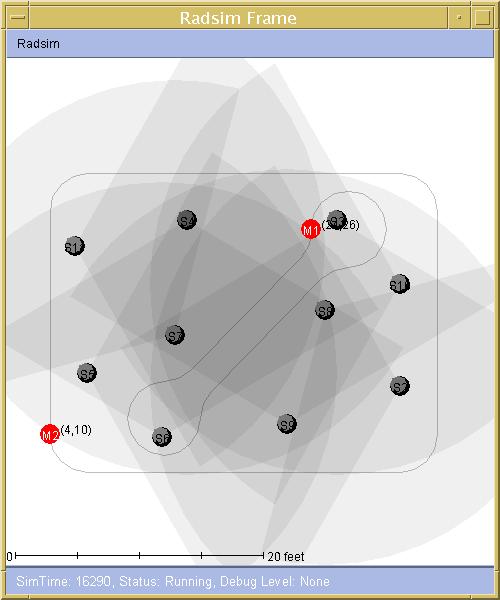
A snapshot of the nodes tracking an object. Nodes 6 and 3 are
taking both frequency and amplitude measurements because they
know where the targets are, other nodes are using frequency only
to try to find the target.
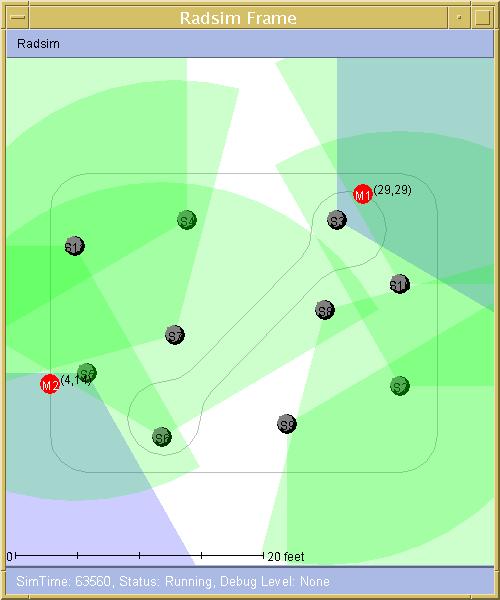
And the position of the target as computed by tracker. The dotted elispes show the possible position of a target given a single measurement. The tracker intersects the elipses to find the real location of the target. This snapshot illustrates the "association" problem which is when determining which target resulted in a particular measurement. In this case, it is clear that the measurement from Node 3 is from a different target to the measurements from nodes 6 and 9.
![]()
![]()
Some snaps of node hardware and moving target
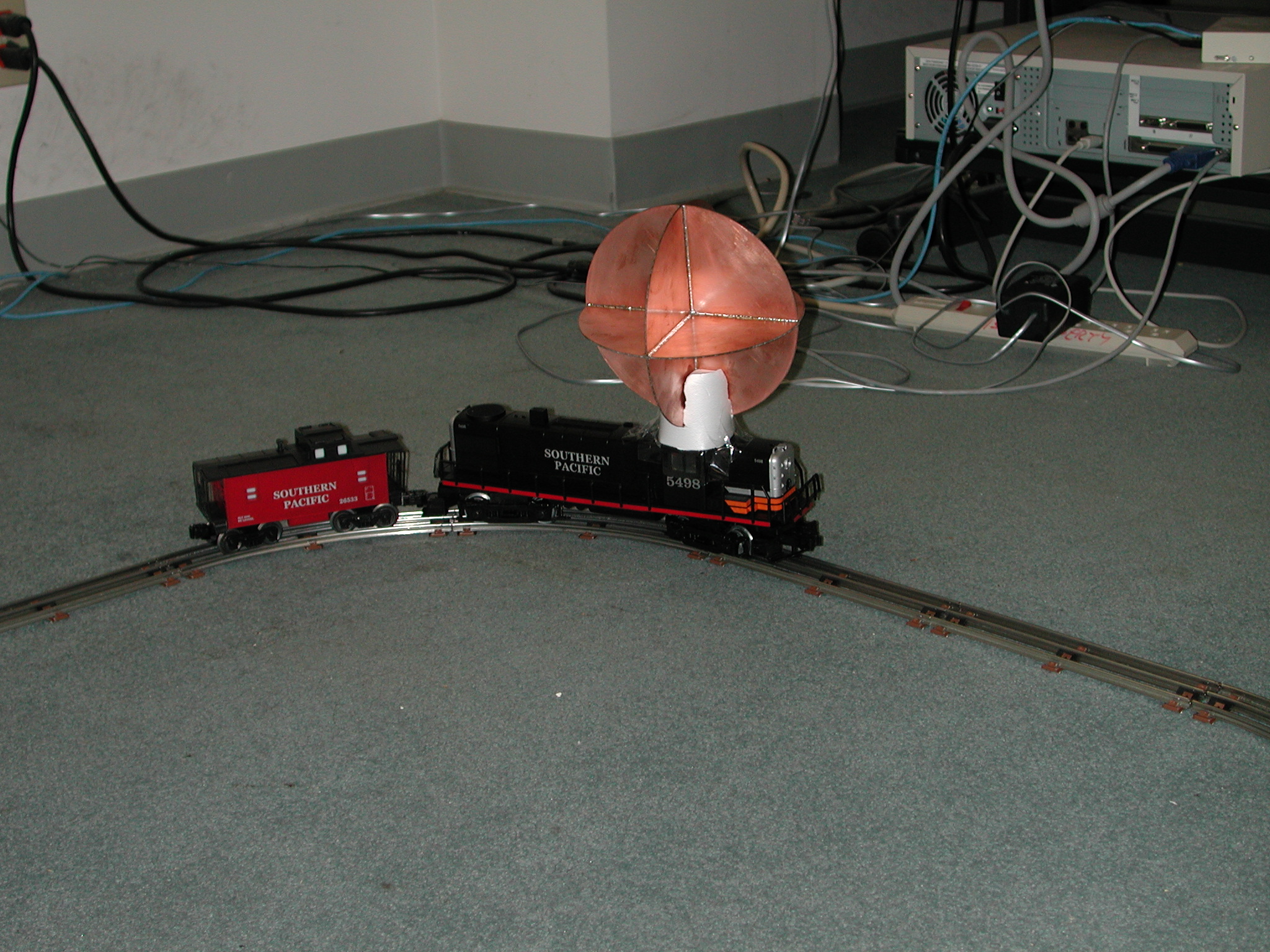
The Target (mounted on a moving train).
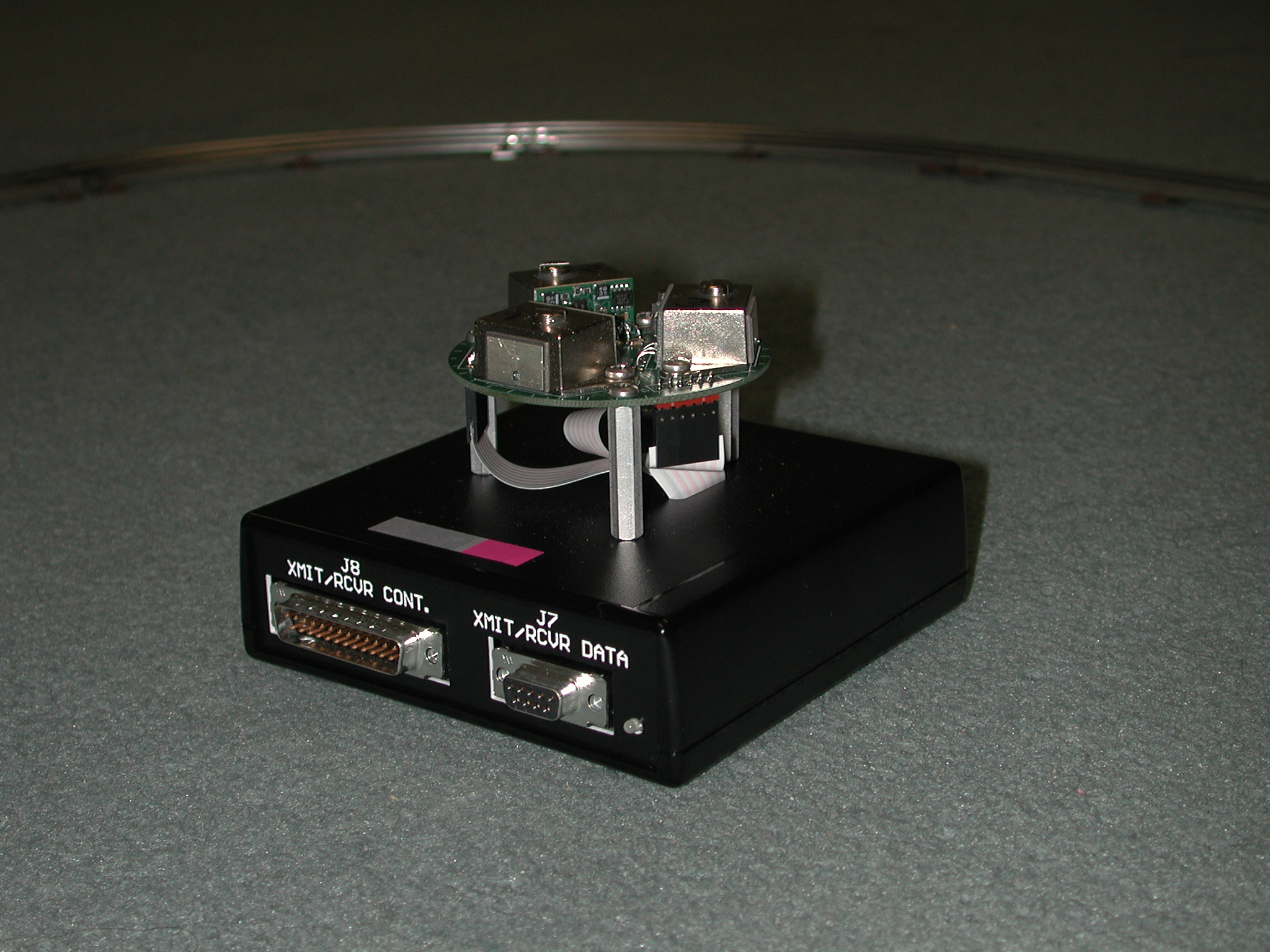
The Sensor Node.

Serious Research can be Fun too!
![]()
![]()
Funding: Autonomous
Negotiating Targets (ANT) program of DARPA
ITO.
![]()