Rendezvous and Proximity Operations (RPO)
The SERC is working on several different modalities, techniques and areas that focus on the general area of rendezvous and proximity operations or RPO. RPO is typically associated with the ability or operation of two (or more) independent space objects that purposefully manuever to within close "proximity" of each other, via various rendezvous techniques. RPO is critical for any "servicing" missions that are coming on line this year, which may include inspection, repair, refuel, upgrade or assembly activities. RPO is a wide and robust area of research, which includes sensors, orbital dynamics techniques, processing and data fusion, and hardware for contact and dock. SERC is exploring multiple arenas within this robust field. Each are listed below.
Test Facility and Platforms
Over the years SERC has created and operated several unique frictionless facilities to support simulated Zero-G operations in support of RPO.
Microsatellite Dynamic Test Facility (MDTF -No longer operating). SERC Engineers created the 2nd largest surface platen for air bearing frictionless operations in the US. The facility was located at Northrop Grumman through a unique partnership at the time.
Standards and Guidelines
The SERC is a co-founding member of the Consortium for Execution of Rendezvous and Servicing Operations (CONFERS) which is an industry-led initiative to leverage best practices from government and industry to research, develop and publish non-binding, consensus-driven technical and operations standards for on-orbit servicing (OOS) and RPO. The SERC provided input to the technical evaluation and survey of past and present RPO related missions for consideration of past and current practices. Multiple papers were created that explored the past practices of RPO, postulated metrics for safety for design and operations, and offered a taxonomy of how to develop safety standards based on functions and attributes. Click on the button below to view publications:
For more information on CONFERS or to join please visit the CONFERS website, www.satelliteconfers.org
Docking/Capture Mechanisms
SERC's docking or capture mechanism focus is on unique mechanisms to increase safety or flexibility in "space robotics". The Lab has been working on multiple different types of "contact" or capture mechanisms for a variety of purposes:
Projects
CLING and CLINGERS
CLING was developed to explore a genderless "standard" in contact/docking mechanism. The first ISS Flight experiment in SERC's history, CLINGERS will test out the mergence of traditional RPO sensors with a docking/capture mechanism.
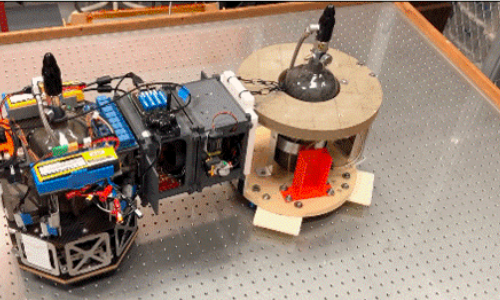
REACCH (Reactive Electro-Adhesion Capture ClotH)
REACCH is a unique approach to merge multiple technologies into a gripper that is invariant to size/volume/shape or materials to contact with in space. (US Patent 2021/0094709, Apr 2021)
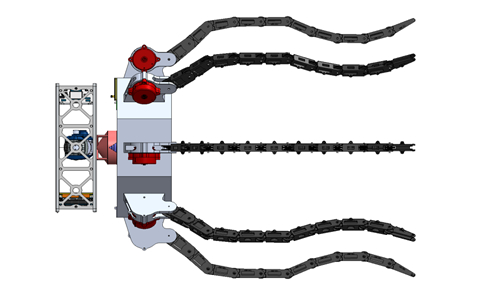
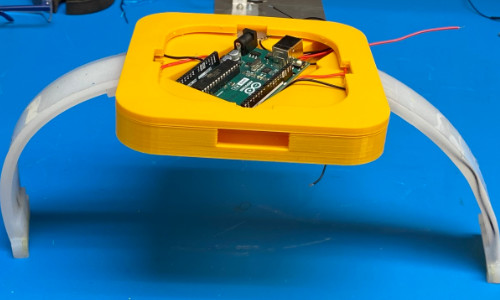
STARFISH (Soft Translatable Advanced Robot For In Space Handling)
STARFISH is an extension of REACCH, except its in pursuit of truly "soft" substrates for a manipulator or a robotic device.
Sensors and Data Fusion
Fusion of Sensors for RPO and Space Awareness
Varying modalities of sensor information at different points in the orbit that account for both light, darkness, glint and even temperature can be fused in realtime for various on orbit characterizations. This is a challenging and processor intensive activity but could provide unique safety and situational awareness information for future rendezvous vehicles. \
LIDAR/Optical/Radar Project
A previous summer student team explored LIDAR, optical and mini-radar/range information and the challenge of fusing disparate data sets to create 3-dimensional point clouds that represented a prototype satellite. Depicture in picture 1 is the model they used and picture 2 is the optical point cloud resulting from it that was generated (showing different angles of view). While successful in single modalities, trying to geolocate and fuse in inertial space (X, Y and Z) every point from one sensor to another is challenging.


Debris Signature Creation
A current project with a visiting scholar from Japan is investigating the ability to create a unique "signature" for a non contiguous object in space (i.e. debris) by using multiple modality sensors and then "fusing" that information.